创办仅仅两年,星动纪元所研发的星动XHAND1,凭借首创关节全直驱灵巧手,成为多家全球机器人厂商的共同选择。包括美国具身智能独角兽Skild AI、韩国Rainbow Robotics、英国Extend Robotics、Discover Robotics,以及英国Humanoid AI新一代人形机器人HMND 01等在内的全球主要机器人厂商,如今均采用星动XHAND1作为核心末端执行器之一来突破具身灵巧操作能力上限。

星动纪元的“灵巧手”为何能够吸引全球机器人厂商?业内专家表示,星动XHAND1与人手大小相仿,可精准复现人手操作,可使用人类工具并支持手内操作,它以“好用、耐用、精准、可反哺具身大脑研究”的核心特性,不仅可适配工业级高强度作业需求,同时能满足算法驱动型企业的高质量数据采集诉求,推动全球人形机器人实现从“能走、能跳”向“会做、会干活”的关键跨越。
加利福尼亚大学伯克利分校在使用星动XHAND1之后,赞扬“中国手”突破仿真瓶颈。例如,在螺丝拧紧与螺母紧固任务中,星动XHAND1面对未见过的物体形状和外部干扰仍保持高鲁棒性,数据完整性仅60%时螺丝拧紧成功率达92%,显著超越直接仿真训练方案。
同济大学、清华大学、上海交通大学、香港大学、上海期智研究院、上海人工智能实验室也联合刊发论文认为,星动纪元通过研发KineDex框架,创新“手把手示教”模式。操作者可直接穿戴星动XHAND1执行生活化任务,同步采集触觉、视觉、本体感受多模态数据,通过图像修复技术移除人体干扰,实现低成本、高质量数据积累。在测试中,9项生活化任务平均成功率达74.4%,数据采集速度较传统遥操提升2倍。
而在斯坦福大学、哥伦比亚大学、摩根大通AI研究院、卡耐基梅隆大学、英伟达联合发表的论文中,表示DexUMI框架让数采效率提升3.2倍。并在包含长期任务和多指接触复杂任务在内的四项任务中,取得了平均86%的成功率。成功实现洗碗、采茶、做早餐等复杂任务的技能迁移。
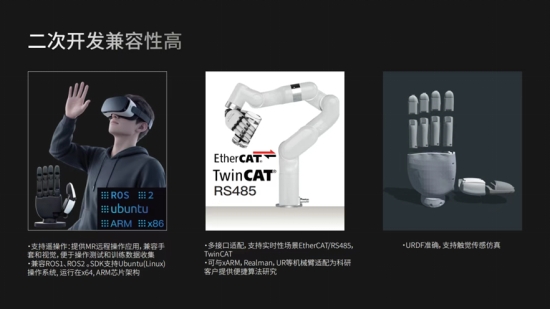
据了解,星动XHAND1兼容性高,二次开发友好。它兼容ROS2和ROS1,支持Ubuntu操作系统,适配x86和ARM架构,多接口适配,支持实时性场景EtherCAT/RS485、TwinCAT,可与xARM、Realman、UR等机械臂适配为科研客户提供便捷算法研究。这也让星动纪元灵巧手成为全球科研机构研究使用的宠儿。
星动纪元认为,五指灵巧手是机器人与物理世界交互的“最后一公里”,其操作精度、感知能力直接决定具身智能的落地边界——作为连接算法创新与现实应用的关键载体,五指灵巧手的性能突破是具身智能从实验室走向产业化的核心前提。而“灵巧手”,就是打开具身通用操作的关键秘钥。
据介绍,星动XHAND1拥有全直驱技术优势:12个独立自由度完全解耦,不仅与人手大小相当,还能够精准复现人手的复杂操作,使用人类工具并支持手内操作,给予AI算法开发“真正的自由”,并支持强化学习、模仿学习等前沿算法深度开发;此外,全直驱驱动方式让灵巧手力量更大,星动XHAND1的最大负重达25kg,最大握力达80N,远超同尺寸的连杆和绳驱方案。同时,星动XHAND1还具有可反驱性、高感知反馈能力、高功率密度与耐用性、二次开发兼容性高等诸多优点。
作为兼做“具身大脑”和“通用本体”的全栈派具身智能企业,截至2025年,星动纪元累计订单总额已突破5亿。未来,星动纪元将继续迭代“模型-本体-场景数据”物理世界AI飞轮,让机器人成为人类的可靠伙伴。(姜伟泽)


